


Positioning Error Analysis and Optimization of Floating Nuclear Power Plant Reactor Refuelling Based on Small Displacement Torsors
-
摘要: 燃料组件装卸是核电站反应堆换料检修的一项重要操作,浮动式核电站由于运行环境特殊,其装卸料定位精度要求更高。本文基于小位移旋量(SDT)的公差建模方法对浮动式核电站反应堆装卸料的导向定位误差进行了分析,采用刚体动力学坐标系变换的方法得到了装卸料定位误差的表达式;采用MATLAB程序进行了模拟计算。对海洋条件下反应堆装卸料的极限倾斜量进行了分析,给出了最大倾角与海浪参数的关系,对燃料组件导向间隙量等关键参数进行了优化,并将其结果与试验数据进行了比较,相符性较好。
-
关键词:
- 浮动式核电站 /
- 装卸料 /
- 定位 /
- 小位移旋量(SDT) /
- 误差
Abstract: Fuel assembly loading and unloading is an important operation of nuclear power plant reactor refueling maintenance. Because of its special operating environment, the loading and unloading positioning accuracy of floating nuclear power plant is higher. Based on the tolerance modeling method of small displacement torsor (SDT), this paper analyzes the guidance and positioning error of reactor loading and unloading in floating nuclear power plant. Using the method of rigid body dynamic coordinate system transformation, the expression of loading and unloading positioning error is obtained; the simulation calculation is carried out using MATLAB program. The limit inclination of reactor loading and unloading under marine conditions is analyzed, and the relationship between the maximum inclination and wave parameters is given. The key parameters such as the guide clearance of the fuel assembly are optimized, and the results are compared with the experimental data, which are in good agreement.-
Key words:
- Floating nuclear power plant /
- Refuelling /
- Positioning /
- Small displacement torsor (SDT) /
- Error
-

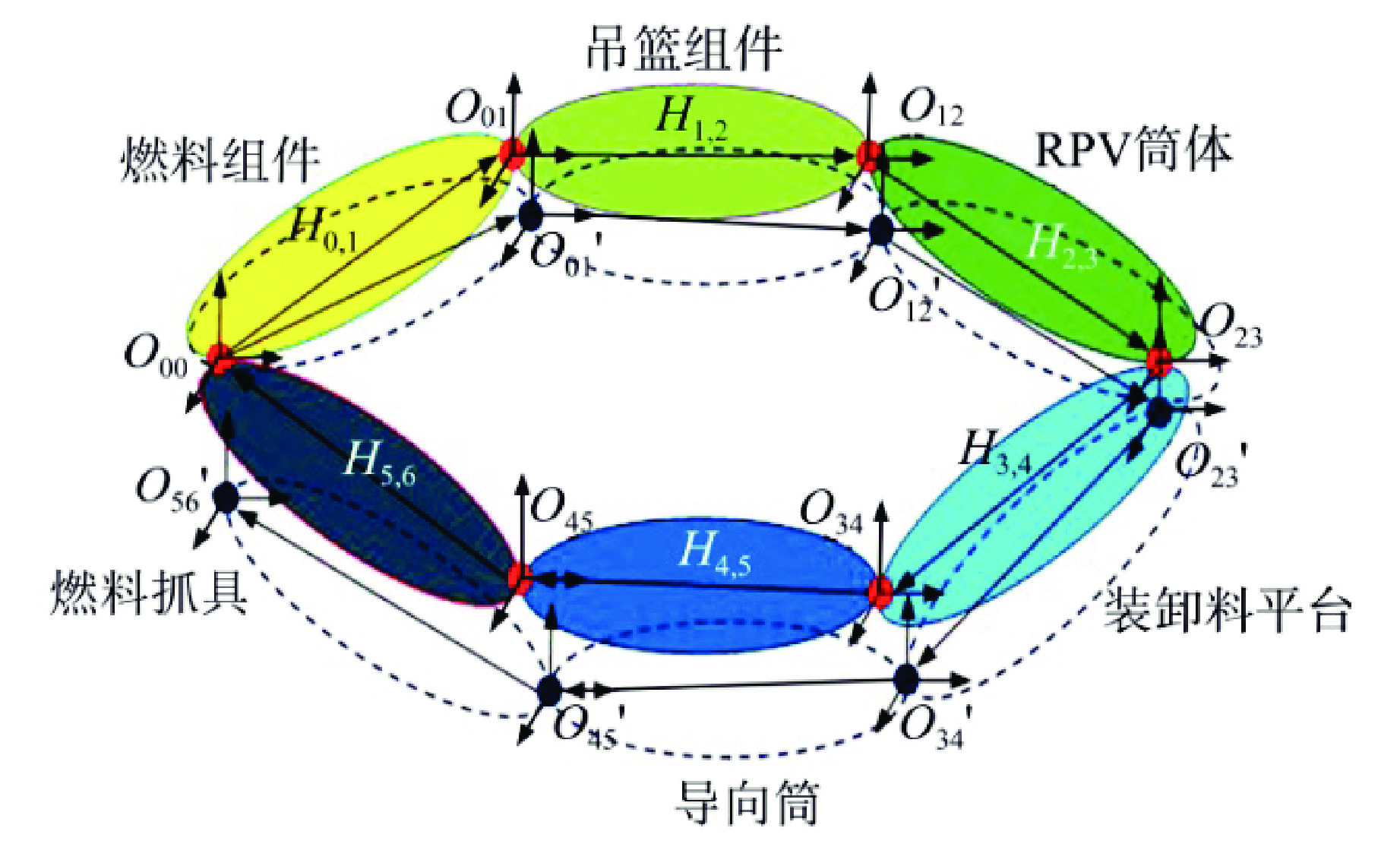
图 2 装卸料系统主要误差传递示意图
Figure 2. Schematic Diagram of Main Error Transmission of Loading and Unloading System
表 1 部分装卸料系统误差参数
Table 1. Some Loading and Unloading System Error Parameters
序号 项目 T D 约束条件 1 燃料组件名
义尺寸(H0,1)$\left[ {\begin{array}{*{20}{c}}1&0&{{\beta _{{H_{0,1}}}}}&{2 + \Delta {X_{{H_{0,1}}}}}\\0&1&{ - {\alpha _{{H_{0,1}}}}}&{2 + \Delta {Y_{{H_{0,1}}}}}\\{ - {\beta _{{H_{0,1}}}}}&{{\alpha _{{H_{0,1}}}}}&1&{ - 1658}\\0&0&0&1\end{array}} \right]$ $\left[ {\begin{array}{*{20}{c} }{ {\alpha _{ {H_{0,1} } } } }&{ {X_{ {H_{0,1} } } } }\\{ {\beta _{ {H_{0,1} } } } }&{ {Y_{ {H_{0,1} } } } }\\0&{ {Z_{ {H_{0,1} } } } }\end{array} } \right]$ $\begin{array}{l} - \dfrac{ {0.175} }{ {170} } \leqslant {\alpha _{ {H_{0,1} } } } < \dfrac{ {0.175} }{ {170} };{\rm{ } } - \dfrac{ {0.175} }{ {170} } \leqslant {\beta _{ {H_{0,1} } } } < \dfrac{ {0.175} }{ {170} };\\ - 0.75 \leqslant \Delta {X_{ {H_{0,1} } } } < 0.75; - 0.75 \leqslant \Delta {Y_{ {H_{0,1} } } } < 0.75;\\{Z_{ {H_{0,1} } } } = - 1658\end{array}$ 2 燃料实际装
配误差(F0,1)$\left[ {\begin{array}{*{20}{c} }1&0&{ {\beta _{ {F_{0,1} } } }}&{\Delta {X_{ {F_{0,1} } } }}\\0&1&{ - {\alpha _{ {F_{0,1} } } }}&{\Delta {Y_{ {F_{0,1} } } }}\\{ - {\beta _{ {F_{0,1} } } }}&{ {\alpha _{ {F_{0,1} } } }}&1&0\\0&0&0&1\end{array} } \right]$ $\left[ {\begin{array}{*{20}{c} }{ {\alpha _{ {F_{0,1} } } }}&{ {X_{ {F_{0,1} } } }}\\{ {\beta _{ {F_{0,1} } } }}&{ {Y_{ {F_{0,1} } } }}\\0&0\end{array} } \right]$ $\begin{array}{l} - \dfrac{ {0.12} }{ {1011} } \leqslant {\alpha _{ {F_{0,1} } } } < \dfrac{ {0.12} }{ {1011} };{\rm{ } } - \dfrac{ {0.12} }{ {1011} } \leqslant {\beta _{ {F_{0,1} } } } < \dfrac{ {0.12} }{ {1011} };\\ - 0.251 \leqslant \Delta {X_{ {H_{0,1} } } } < 0.251;{\rm{ } } - 0.251 \leqslant \Delta {Y_{ {H_{0,1} } } } < 0.251\end{array}$ 3 导向装置安
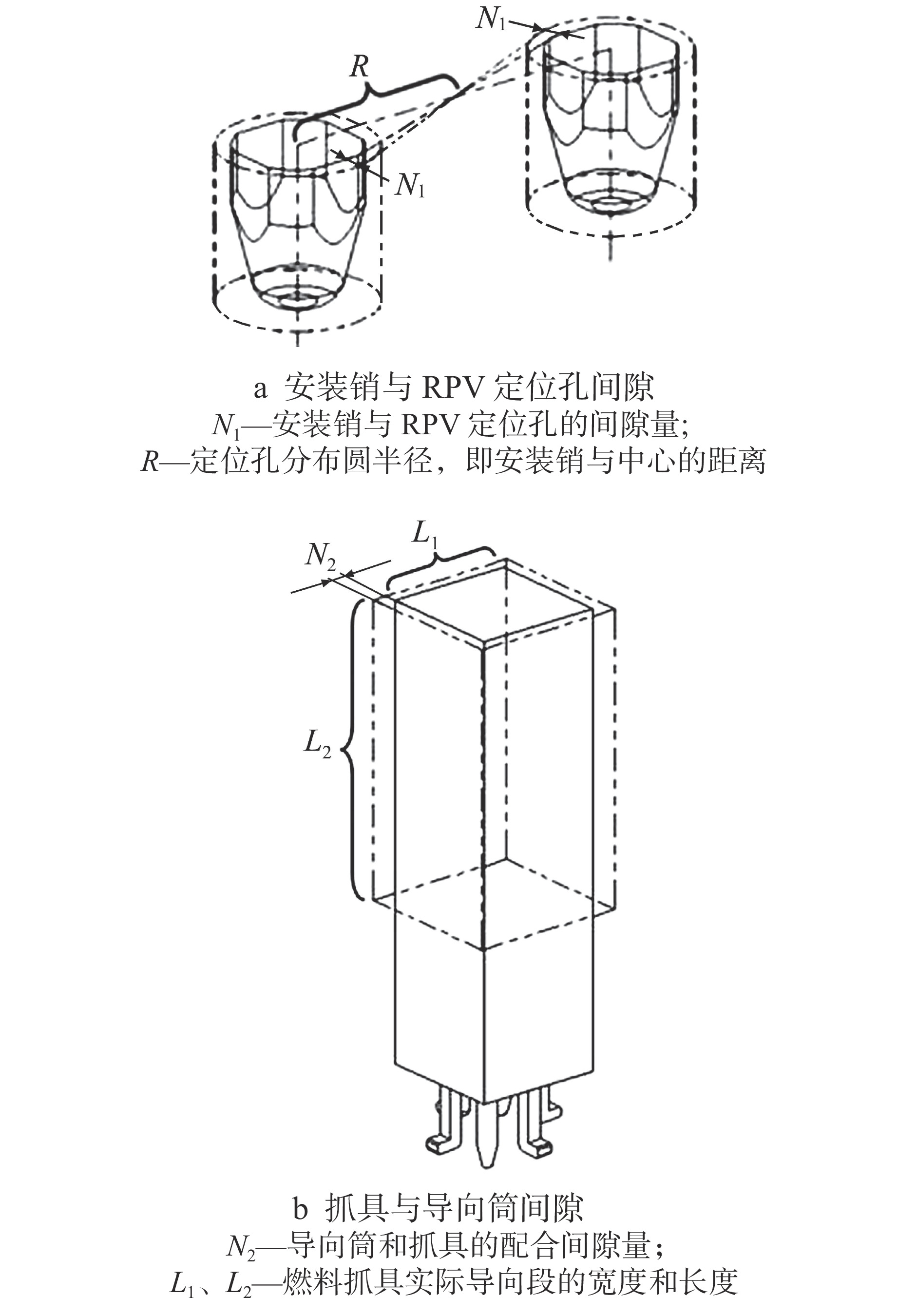
装误差(F2,3)$\left[ {\begin{array}{*{20}{c} }1&{ - {\gamma _{ {F_{2,3} } } }}&0&{\Delta {X_{ {F_{2,3} } } }}\\{ {\gamma _{ {F_{2,3} } } }}&1&0&{\Delta {Y_{ {F_{2,3} } } }}\\0&0&1&0\\0&0&0&1\end{array} } \right]$ $\left[ {\begin{array}{*{20}{c} }0&{ {X_{ {F_{2,3} } } }}\\0&{ {Y_{ {F_{2,3} } } }}\\0&0\end{array} } \right]$ $\begin{array}{l} - \dfrac{ { {N_1} } }{ {1202} } \leqslant {\gamma _{ {F_{2,3} } } } < \dfrac{ { {N_1} } }{ {1202} };\\ - {N_1} \leqslant \Delta {X_{ {F_{2,3} } } } < {N_1};{\rm{ } } - {N_1} \leqslant \Delta {Y_{ {F_{2,3} } } } < {N_1}\end{array}$ 4 导向筒的导向
定位误差(F4,5)$\left[ {\begin{array}{*{20}{c} }1&{ - {\gamma _{ {F_{4,5} } } }}&{ {\beta _{ {F_{0,1} } } }}&{\Delta {X_{ {F_{0,1} } } }}\\{ {\gamma _{ {F_{4,5} } } }}&1&{ - {\alpha _{ {F_{0,1} } } }}&{\Delta {Y_{ {F_{0,1} } } }}\\{ - {\beta _{ {F_{4,5} } } }}&{ {\alpha _{ {F_{4,5} } } }}&1&0\\0&0&0&1\end{array} } \right]$ $\left[ {\begin{array}{*{20}{c} }{ {\alpha _{ {F_{4,5} } } }}&{ {X_{ {F_{4,5} } } }}\\{ {\beta _{ {F_{4,5} } } }}&{ {Y_{ {F_{4,5} } } }}\\{ {\gamma _{ {F_{4,5} } } }}&0\end{array} } \right]$ $\begin{array}{l} - \dfrac{ { {N_2} } }{ {998} } \leqslant {\alpha _{ {F_{4,5} } } } < \dfrac{ { {N_2} } }{ {998} };{\rm{ } } - \dfrac{ { {N_2} } }{ {998} } \leqslant {\beta _{ {F_{4,5} } } } < \dfrac{ { {N_2} } }{ {998} };\\ - \dfrac{ { {N_2} } }{ {170} } \leqslant {\gamma _{ {F_{4,5} } } } < \dfrac{ { {N_2} } }{ {170} };\\ - \dfrac{ { {N_2} } }{2} \leqslant \Delta {X_{ {H_{0,1} } } } < \dfrac{ { {N_2} } }{2};{\rm{ } } - \dfrac{ { {N_2} } }{2} \leqslant \Delta {Y_{ {H_{0,1} } } } < \dfrac{ { {N_2} } }{2}\end{array}$  下载: 导出CSV
下载: 导出CSV
表 2 不同设备安装间隙值和装卸料定位精度误差 mm
Table 2. Installation Clearance Values of Different Equipment and Loading and Unloading Positioning Accuracy Error
序号 间隙量 平均误差 最大误差 导向装置 导向筒 1 0.02 0.1 1.44 3.50 2 0.10 0.5 1.49 3.42 3 0.50 3.0 2.64 6.89
下载: 导出CSV
-
[1] 邹树梁,葛馨,黄燕. 海上浮动核电站发展现状及政策标准[J]. 舰船科学技术,2019, 10(41): 80-83+93. [2] 叶剑军,张剑,张鹏,等. 国产装卸料机堆芯定位技术研究[J]. 核动力工程,2016, 37(5): 84-88. [3] 安彦波,罗英,刘聪,等. 浮动式核电站装卸料平台高精度定位技术研究[J]. 核动力工程,2017, 38(1): 135-138. [4] 杜群贵,翟晓晨,文奇,等. 基于刚体运动学的复杂装配体递推误差分析[J]. 华南理工大学学报(自然科学版),2017, 45(9): 26-33. doi: 10.3969/j.issn.1000-565X.2017.09.004 [5] LAFOND P, LAPERRIER L. Jacobian-based modeling of dispersions affecting pre-defined functional requirements of mechanical assemblies[C]. Proceedings of the 1999 IEEE International Symposium on Assembly and Task Planning, Porto, Portugal, July , 1999. [6] DESROCHERS A, GHIE W, LAPERRIERE L. Application of a unified jacobian torser model for tolerance analysis[J]. Journal of Computing and Information Science in Engineering, 2003, 3(3): 2-14. -

 下载:
下载:


图(4) / 表(2)
计量
- 文章访问数: 350
- HTML全文浏览量: 149
- PDF下载量: 24
- 被引次数: 0
