


Analysis and Experimental Study on Control Rod Dropping under Seismic Conditions
-
摘要: 为研究地震作用下的控制棒落棒历程,基于惯性阻力计算方法、粘性阻力计算方法及碰撞接触算法,以第三代核电先进型研发项目某堆型控制棒驱动线为背景,进行了地震载荷下的落棒历程计算。在多点激励试验装置上对该堆型驱动线1∶1样机进行地震试验,采用多频波法,在驱动线与反应堆的多处关联点施加地震载荷,包括运行基准地震(OBE)试验和安全停堆地震(SSE)试验。研究结果表明,各工况下落棒时间、落棒位移、速度和加速度时程的计算曲线与试验曲线符合较好。因此,本研究建立的研究方法能够为核电厂安全分析提供必要的分析方法。Abstract: In order to study control rod dropping history under seismic conditions, based on the inertia resistance calculation method, viscous resistance calculation method and collision contact algorithm, the rod dropping history under seismic loads is calculated under the background of a reactor control rod drive line of the third generation nuclear power advanced R &D project. The seismic test of the 1:1 prototype of the reactor drive line is carried out on the multi-point excitation tester. The multi-frequency wave method is used to apply seismic loads at several related points between the drive line and the reactor, including operating basis earthquake (OBE) test and safe shutdown earthquake (SSE) test. The results show that the calculation curves of rod dropping time, rod displacement, velocity and acceleration are in good agreement with the test curves. Therefore, the research methods established in this study can provide necessary analysis methods for the safety analysis of nuclear power plants.
-
Key words:
- Control rod drive line /
- Seismic load /
- Collision contact /
- Seismic test
-
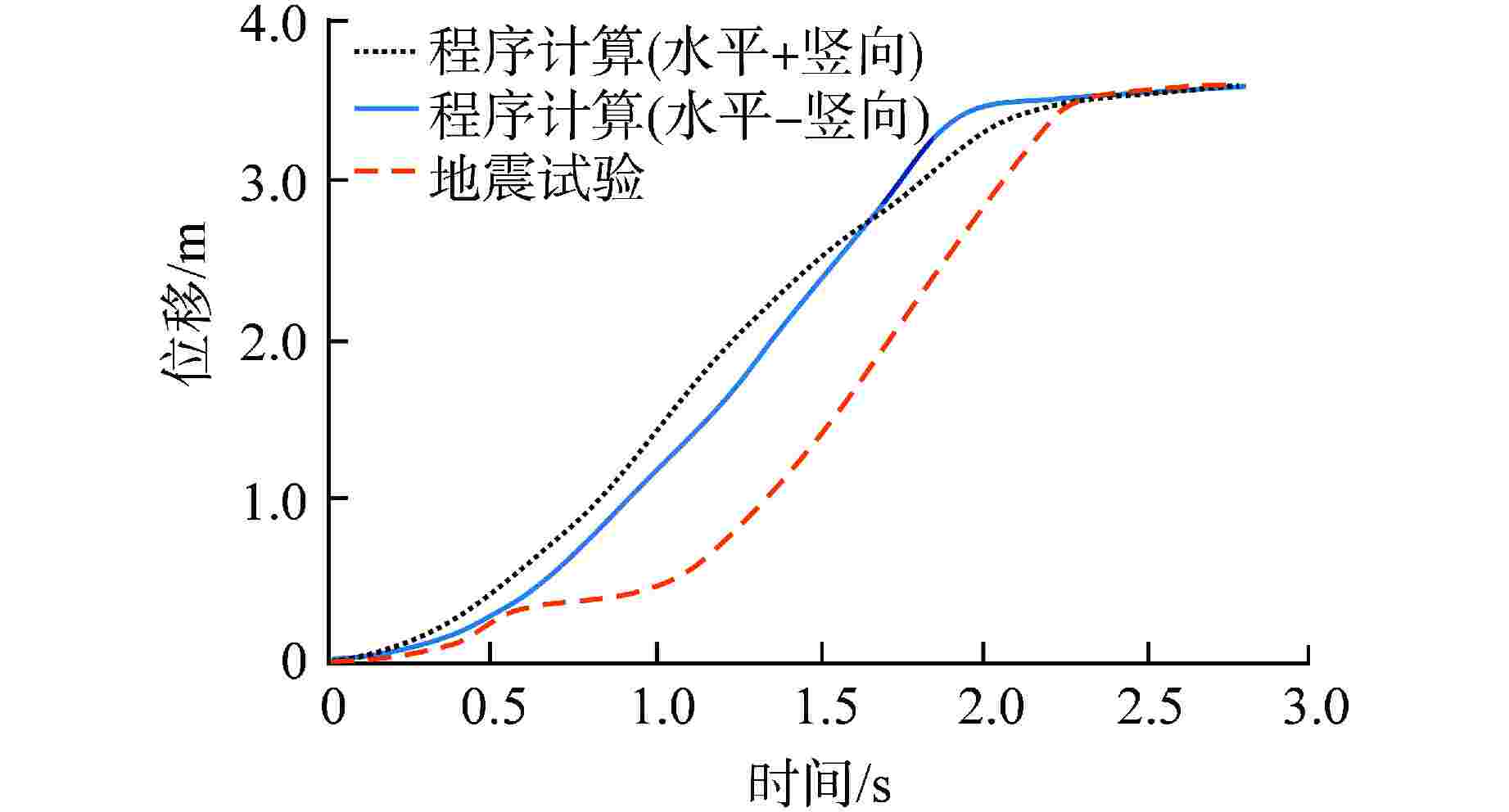
图 5 OBE水平与竖向叠加的位移时程
Figure 5. Displacement-Time History of OBE Horizontal and Vertical Superposition
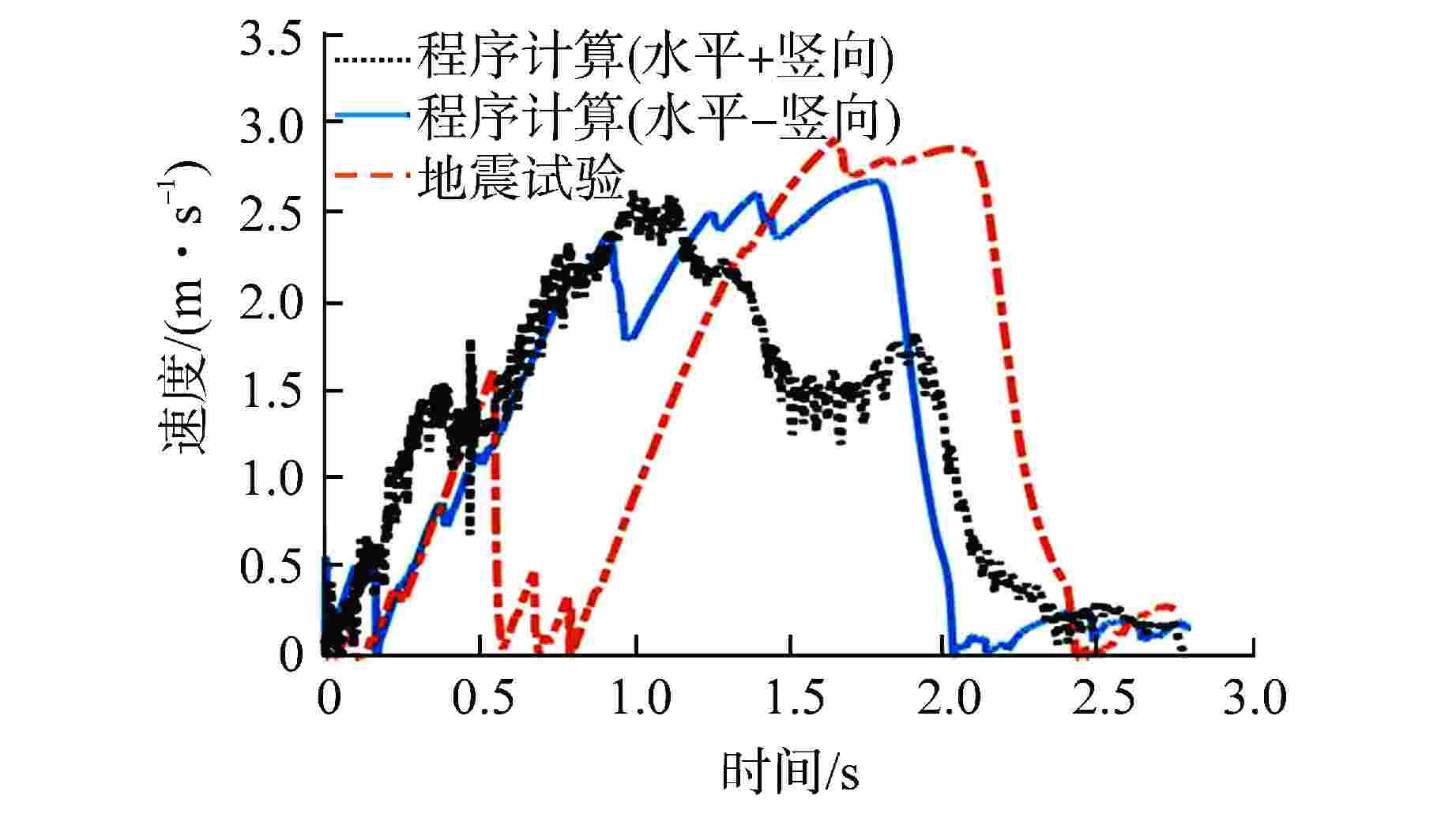
图 6 OBE水平与竖向叠加的速度时程
Figure 6. Velocity-Time History of OBE Horizontal and Vertical Superposition
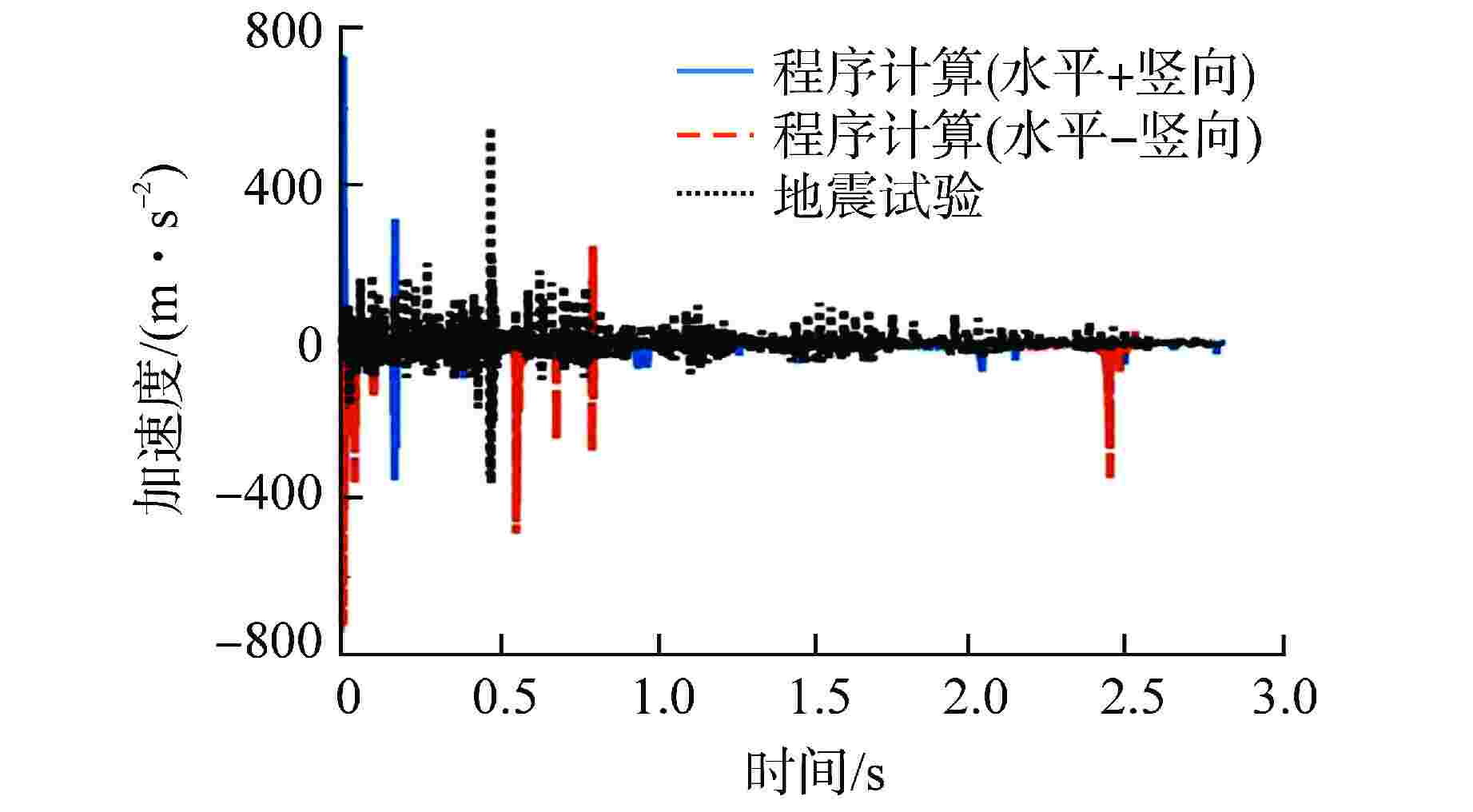
图 7 OBE水平与竖向叠加的加速度时程
Figure 7. Acceleration-Time History of OBE Horizontal and Vertical Superposition
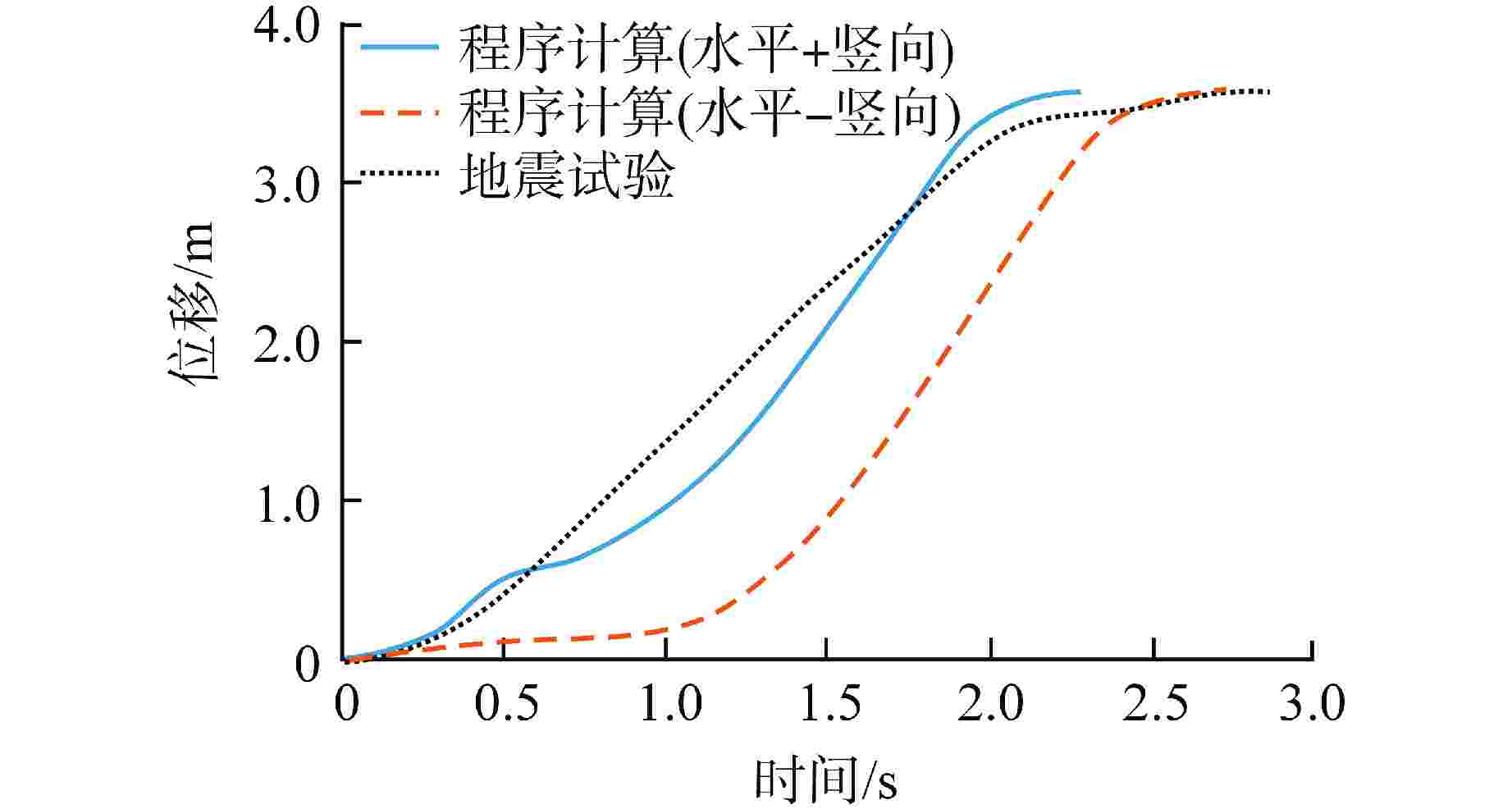
图 8 SSE水平与竖向叠加的位移时程
Figure 8. Displacement-Time History of SSE Horizontal and Vertical Superposition
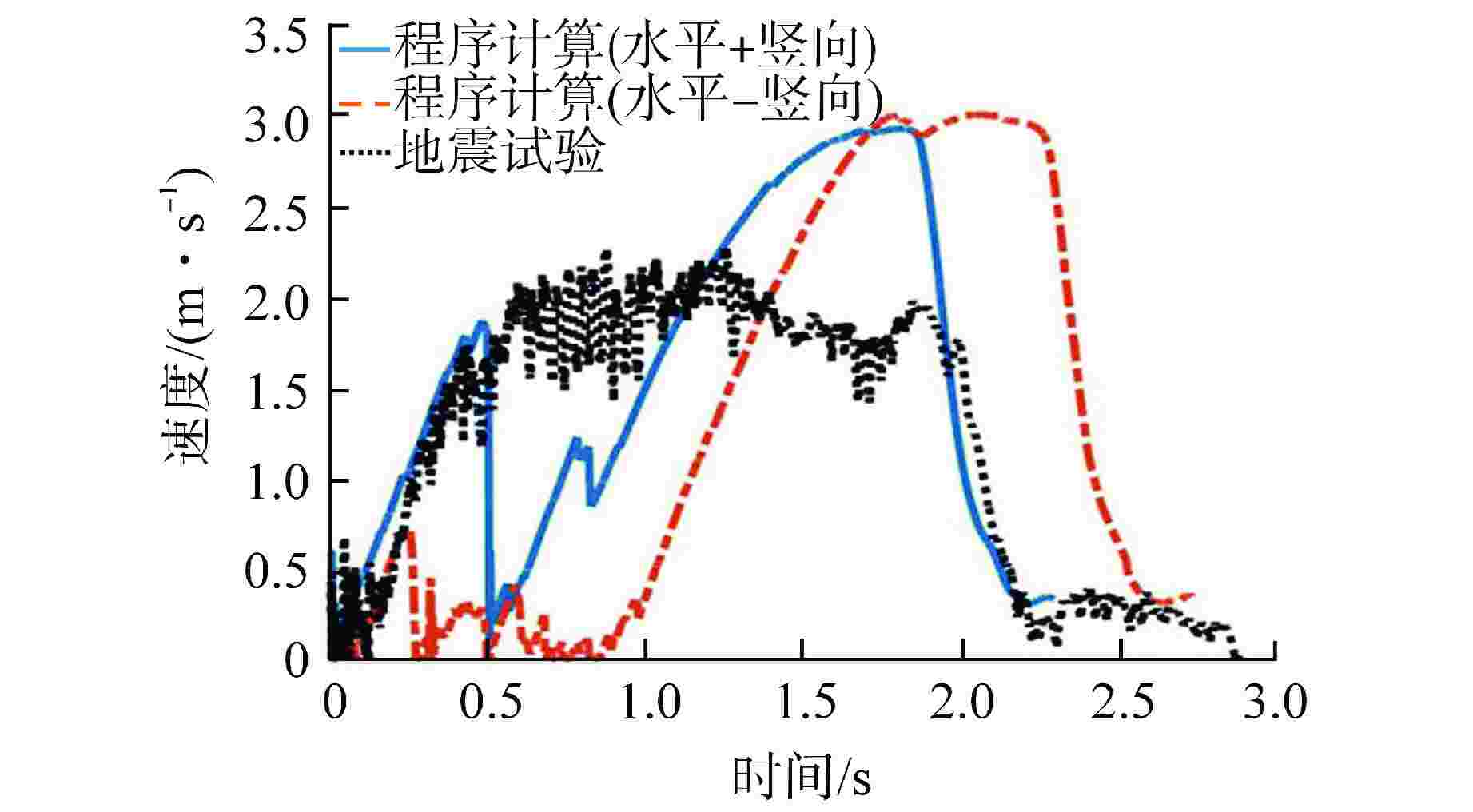
图 9 SSE水平与竖向叠加的速度时程
Figure 9. Velocity-Time History of SSE Horizontal and Vertical Superposition
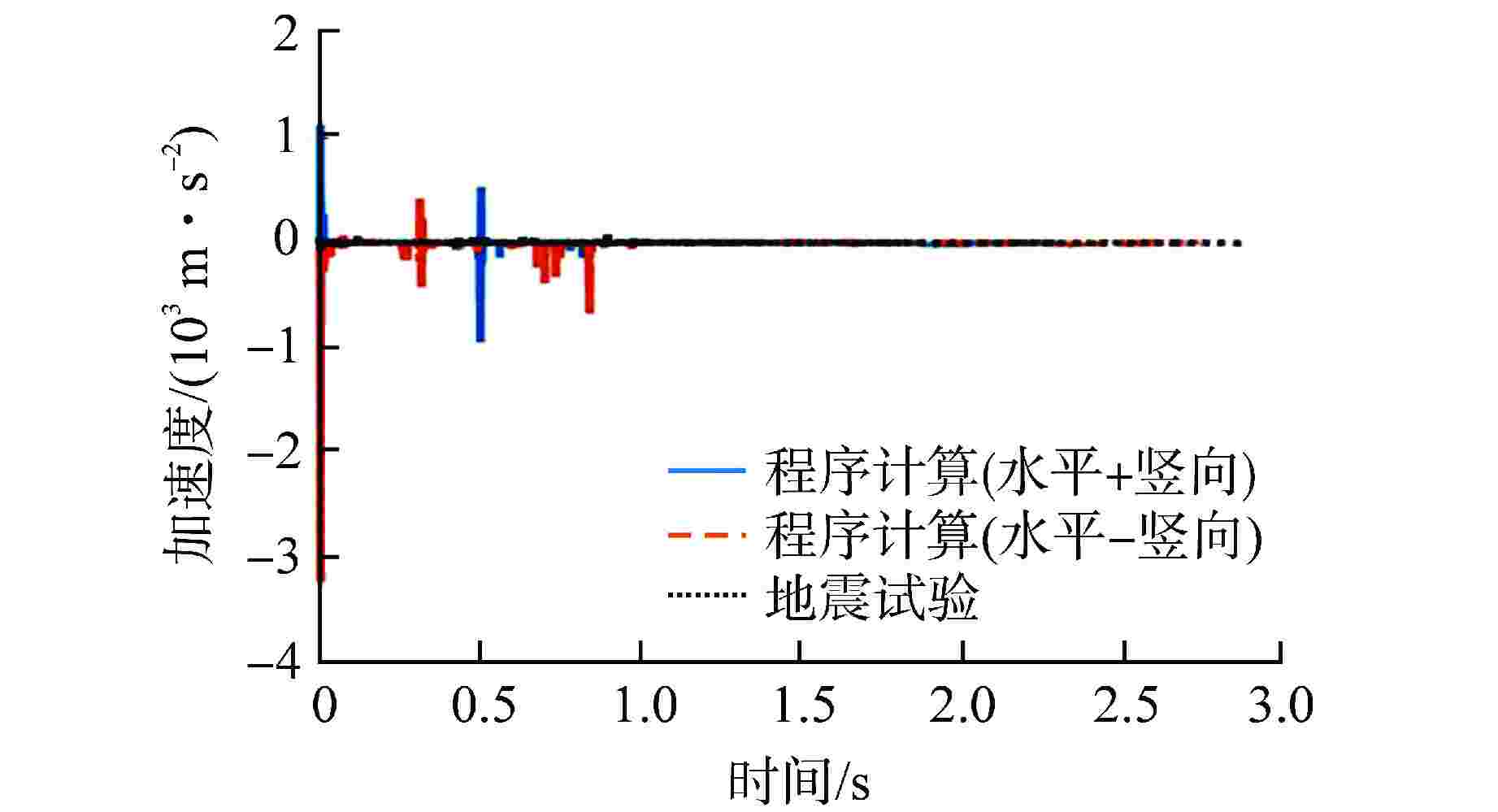
图 10 SSE水平与竖向叠加的加速度时程
Figure 10. Acceleration-Time History of SSE Horizontal and Vertical Superposition
表 1 落棒时间结果
Table 1. Rod Dropping Time Results
工况 计算值/s 试验值/s 误差/% 静态落棒 1.668 1.720 3.02 OBE 水平+竖向 2.805 2.790 0.54 水平-竖向 2.749 SSE 水平+竖向 2.286 水平-竖向 2.731 2.867 4.74 空格—试验无此工况  下载: 导出CSV
下载: 导出CSV
-
[1] 孙磊,于建华,魏永涛,等. 控制棒组件落棒时间与历程计算[J]. 核动力工程,2003, 24(1): 59-62,76. doi: 10.3969/j.issn.0258-0926.2003.01.015 [2] YOON K H, KIM J Y, LEE K H, et al. Control rod drop analysis by finite element method using fluid–structure interaction for a pressurized water reactor power plant[J]. Nuclear Engineering and Design, 2009, 239(10): 1857-1861. doi: 10.1016/j.nucengdes.2009.05.023 [3] 顾汉洋,张朝柱,陈宇清,等. AP1000控制棒驱动线落棒试验研究[J]. 核动力工程,2015, 36(4): 145-148. [4] 杜建勇,李朋洲,李琦,等. ACP1000控制棒驱动线抗震试验研究[J]. 核动力工程,2015, 36(5): 105-107. [5] 张丹,冯双双,魏晓娟,等. 不同端部形状的细长圆柱体的附加质量研究[J]. 重庆大学学报,2016, 39(5): 26-33. doi: 10.11835/j.issn.1000-582X.2016.05.004 -

 下载:
下载:











计量
- 文章访问数: 182
- HTML全文浏览量: 112
- PDF下载量: 5
- 被引次数: 0
