


Researh on Vector Control Technology of Synchronous Reluctance Motor Control Rod Drive Mechanism
-
摘要: 针对同步磁阻电机型控制棒驱动机构(CRDM)电磁高度耦合难以对输出力矩进行有效线性调节的问题,研究了同步磁阻电机型CRDM的矢量控制技术。将同步磁阻电机CRDM的数学模型映射至同步旋转坐标系内,对输出电磁力矩与磁链进行解耦。通过励磁电流与力矩电流的独立调节,实现输出力矩的线性控制。利用MATLAB/SIMULINK搭建了同步磁阻电机型CRDM的矢量控制模型,对控制方案进行验证。仿真结果表明,本研究的控制方案具有更优的响应速度、稳态精度以及平稳性。
-
关键词:
- 控制棒驱动机构(CRDM) /
- 同步磁阻电机 /
- 坐标变换 /
- 矢量控制
Abstract: Aiming at the problem that the synchronous reluctance motor control rod drive mechanism (CRDM) is highly electromagnetically coupled and it is difficult to effectively adjust the output torque linearly, this paper studies the vector control technology of the synchronous reluctance motor CRDM. The mathematical model of the synchronous reluctance motor of the CRDM is mapped into the synchronous rotating coordinate system, and the output electromagnetic torque and the flux linkage are decoupled. And the excitation current and the torque current are independently adjusted to realize the linear control of the output torque. The vector control model of the synchronous reluctance motor CRDM was built using MATLAB/SIMULINK to verify the control scheme. The simulation results show that the control scheme of this research has better response speed, steady-state accuracy and stability.-
Key words:
- CRDM /
- Synchronous reluctance motor /
- Coordinate transformatiosn /
- Vector control
-
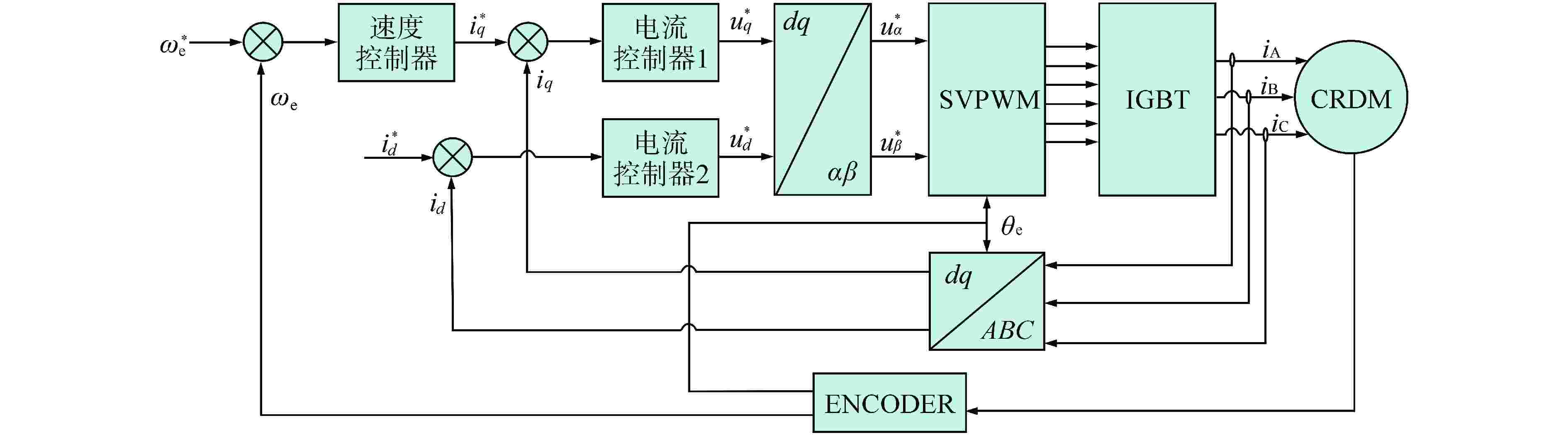
图 2 同步磁阻电机型CRDM矢量控制原理框图
$ \omega _{\text{e}}^{\text{*}} $—转子的电角速度给定值;$i_{d}^{\text{*}}$、$i_{q}^{\text{*}}$—dq轴下定子电流给定值;$u_{d}^{\text{*}}$、$u_{q}^{\text{*}}$—dq轴下的定子电压给定值;$ u_\alpha ^{\text{*}} $、$ u_\beta ^{\text{*}} $—两相静止坐标下的定子电压
Figure 2. Principle Block Diagram of the Vector Control of the Synchronous Reluctance Motor CRDM
-
[1] 谢细明,彭航,张倬,等. 核反应堆控制棒驱动机构动作部件状态检测研究[J]. 核动力工程,2019, 40(2): 90-94. [2] TAGHAVI S, PILLAY P. A novel grain-oriented lamination rotor core assembly for a synchronous reluctance traction motor with a reduced torque ripple algorithm[J]. IEEE Transactions on Industry Applications, 2016, 52(5): 3729-3738. doi: 10.1109/TIA.2016.2558162 [3] 彭翠云,何攀,彭宵微,等. 基于结构噪声检测的控制棒驱动机构运行故障分析方法研究[J]. 核动力工程,2020, 41(3): 214-216. [4] CAI H W, GUAN B, XU L Y. Low-cost ferrite PM-assisted synchronous reluctance machine for electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5741-5748. doi: 10.1109/TIE.2014.2304702 [5] 张建建,青先国,蔡晨,等. 基于电流特征处理的CRDM逆变器故障诊断方法研究[J]. 核动力工程,2020, 41(S2): 36-40. [6] 于天达,杨方亮,陈西南,等. 控制棒驱动机构用同步磁阻电机低速运转平稳性研究[J]. 机械设计与制造工程,2016, 45(12): 91-96. doi: 10.3969/j.issn.2095-509X.2016.12.022 [7] 周立求. ALA转子同步磁阻电机直接转矩控制系统研究[D]. 武汉: 华中科技大学, 2005: 23-26. [8] 阮毅,陈伯时. 电力拖动自动控制系统—运动控制系统[M]. 第四版. 北京: 机械工业出版社, 2020: 35-50. [9] BETZ R E. Theoretical aspects of control of synchronous reluctance machines[J]. IEE Proceedings B (Electric Power Applications), 1992, 139(4): 355-364. doi: 10.1049/ip-b.1992.0042 [10] 史旺旺,杨俊伟. 一种实现SVPWM调制效果的直接方法[J]. 电气传动,2019, 49(7): 43-47. -

 下载:
下载:













图(12)
计量
- 文章访问数: 592
- HTML全文浏览量: 161
- PDF下载量: 56
- 被引次数: 0
