


Application of High Precision Laser Measurement Technology Based on Spherical Coordinate Method in Nuclear Power Plant Reactor Body Maintenance
-
摘要: 反应堆本体维护是核电机组换料大修必须要做的重要工作。由于反应堆本体中设备结构复杂、尺寸较大、维修工期紧张、辐射剂量率高,缺陷的测量检查、水下维修工装的安装定位等非常困难,无法应用常规技术进行测量检查。本研究采用先进的基于球坐标法的高精度激光测量技术并结合柔性工装,可实现在大型空间内水下远距离的精确测量,并对测量数据进行趋势分析,得到出现偏差的原因,为机组大修提供可靠数据支持,从而保证高辐射环境水下维修工作的顺利开展,确保核电厂安全、可靠、稳定运行。Abstract: The maintenance of reactor body is an important work that must be done in refueling overhaul of nuclear power units. Due to the complex structure, large size, tight maintenance period and high radiation dose rate of the equipment in the reactor body, it is very difficult to measure and inspect defects and install and locate underwater maintenance tools, which cannot be measured and inspected with conventional techniques. In this study, advanced high-precision laser measurement technology based on spherical coordinate method combined with flexible tooling can realize accurate underwater long-distance measurement in large space. The trend of the measured data can be analyzed, and the reasons for the deviation are obtained, which can provide reliable data support for the overhaul of the unit, thus ensuring the smooth execution of underwater maintenance work in high radiation environment and ensuring the safe, reliable and stable operation of the nuclear power plant.
-
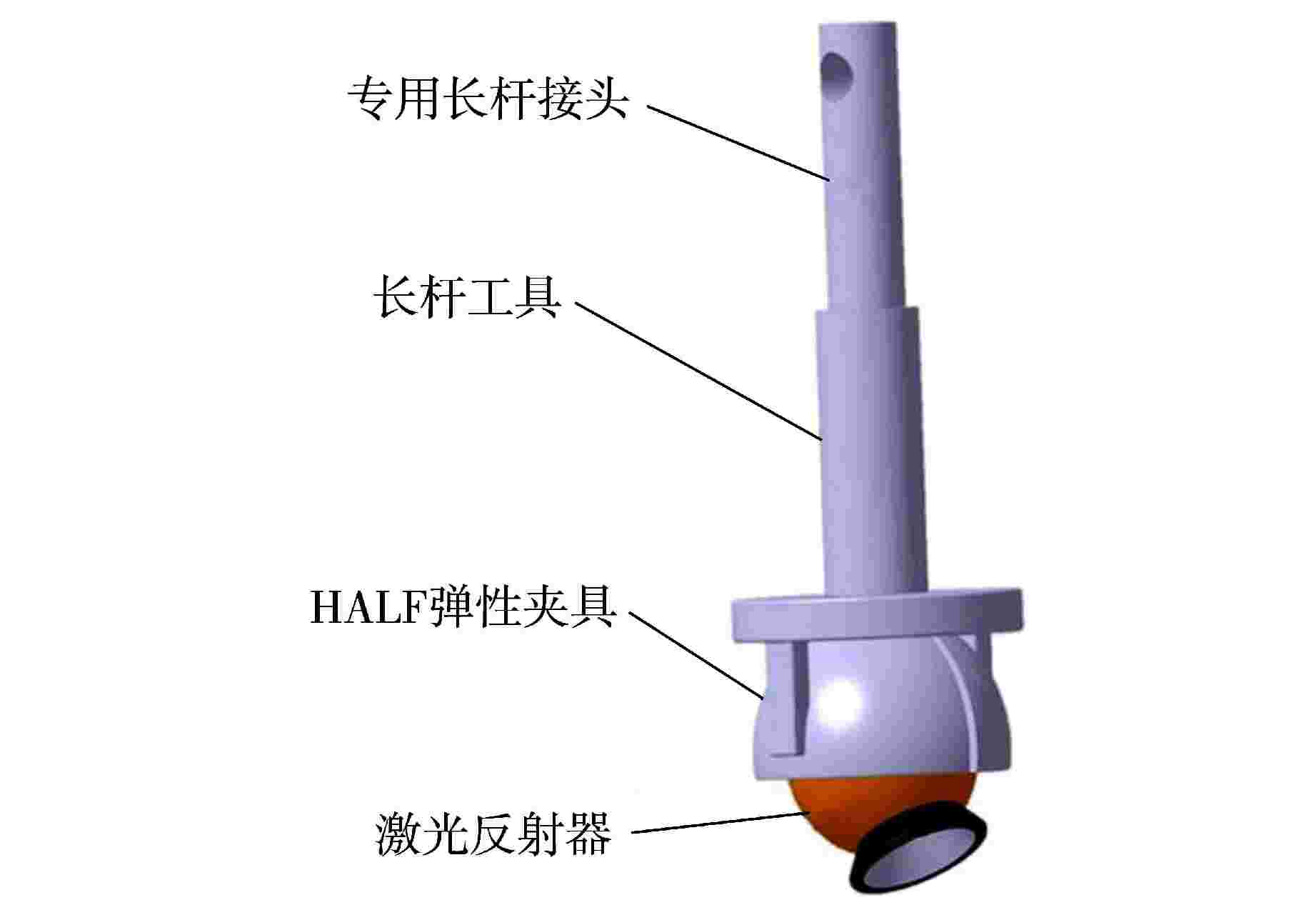
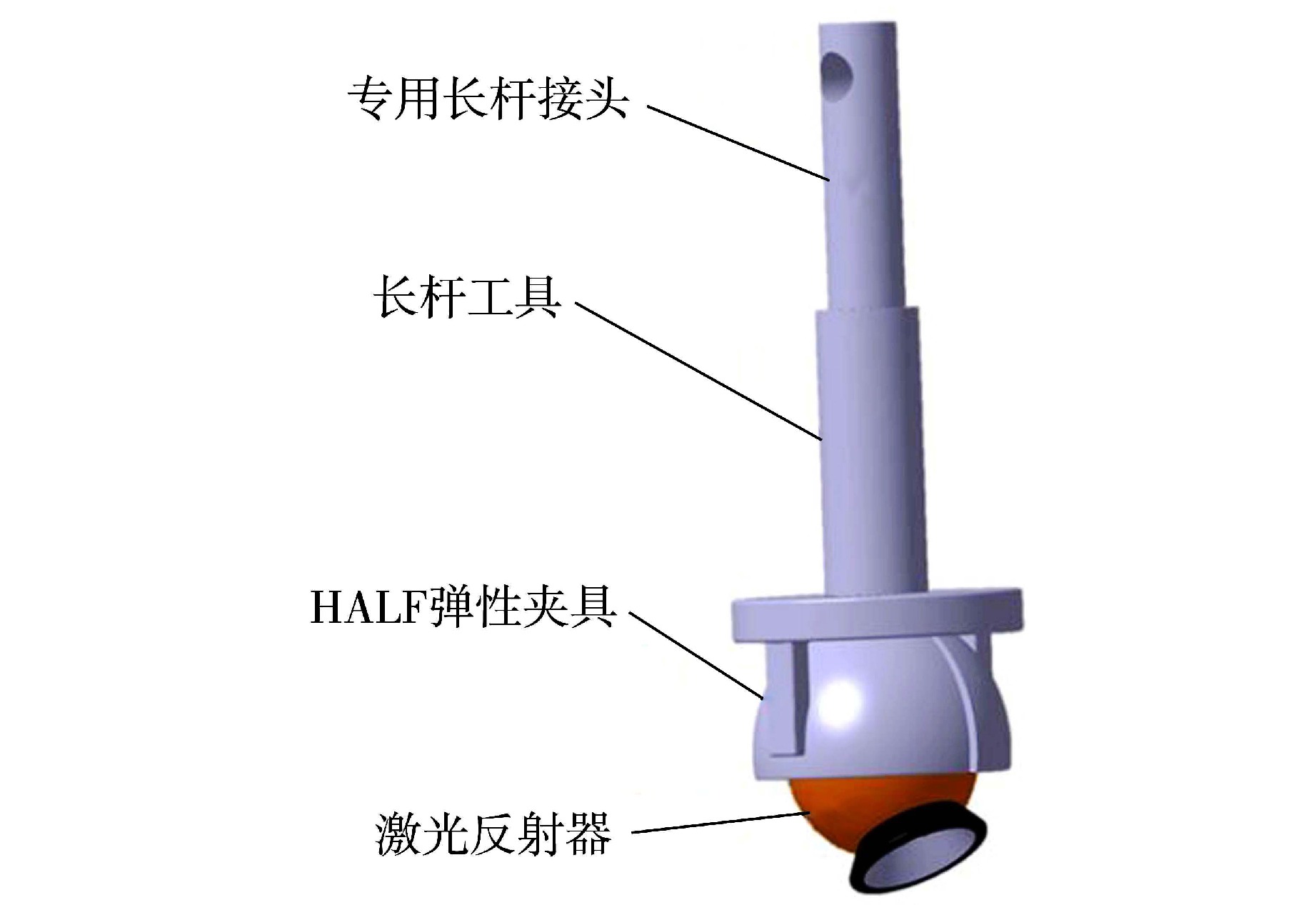
图 3 基于球坐标法的三维激光测量柔性工装模型
Figure 3. 3D Laser Measurement Model Based on Spherical Coordinate Method
表 1 常见的大空间坐标测量方法对比
Table 1. Comparison of Common Large Space Coordinate Measurement Methods
测量方法 原理 优点 缺点 直接接触式测量[4] ①固定式:有固定工作区域,在3个互相正交的轴向上均装有测量系统、导向系统等 ; ①固定式:坐标测量机功能丰富,既能够测量直接尺寸,也可由专业软件来分析计算样品形位误差等参数,精度高; ①固定式:体积庞大、灵活性差、测量方式被动、对测量环境要求高、不适应现场测量等; ②便携式:便携测量系统通过测量角度、长度,经由一定的定位算法求出测量点的空间坐标。 ②便携式:结构紧凑、方便携带、测量空间开放、主动测量等。 ②便携式:在使用或闲置一段时间后,易造成轴承的磨损及关节臂的变形,精度逐渐下降而无法补偿。 基于多边形三维坐标测量[5] 在工作空间不同位置安装若干台激光测距仪,用激光测距仪分别获取同标靶基站之间的距离后, 再通过数学交汇模型来萃取关于标靶基站的空间坐标。 不涉及角度值测量,理论上可实现很高的精度。 不能进行目标识别和主动测量,需要人工校对多个测量基站和标靶基站的位置,工作效率较低。 基于方位角的空间交汇测量[4] 采用高精度的角度传感器对待测点的空间方位角进行测量,然后利用三角交汇关系得到目标点的空间坐标。 十几米以内的测量范围精度可达0.03 mm/m。 待测区域超出范围时,测量精度明显下降。测量时需要手动照准待测点,逐点测量,因此测量效率不高、人工误差大、自动化程度低。 基于数字摄像机的测量[5-6] 通过1台(若干)相机依次从不同的位置拍摄被测物体来实现空间交汇,最后通过计算机图像处理技术得到精确的三维坐标。 具有较高的测量精度和测量效率。 受数字成像设备分辨率的限制,且单个摄像机可测视场角较小,而多台摄像机拼接则造成操作复杂,系统构建成本高或难以构建等问题。 基于球坐标法的三维激光测量[7] 测量系统能跟随目标镜运动,把目标镜放置于待测点,跟踪仪就能测量目标镜中心点三维坐标,然后根据被测点与目标镜中心点位置关系求解待测点的信息。 测量精度髙、测量空间大、动态测量、安装简单且操作方便。 在堆本体维修过程中需依托特种维修技术的专用柔性工装。  下载: 导出CSV
下载: 导出CSV
表 2 相关部件测量结果记录表
Table 2. Measurement Results for Related Components
被测物 测量内容 标准值 测量结果 池壁导向柱 2根导向柱中心距/mm 1500 1501.601 2根导向柱外径/mm Φ158 Φ158.107;Φ157.692 下部构件存放架 12颗挡钉组合成的圆弧直径/mm Φ2978 Φ2982.352 4块支撑面拟合成一个平面的平面度/mm ≤0.16 平面度:0.256 其他 2根导向柱轴线连线的中间点与4块支撑面拟合的圆心X方向位移/mm 0 −24.297
下载: 导出CSV
表 3 某核电厂稳定运行后测量结果记录表
Table 3. Measurement Results of a Nuclear Power Plant after Stable Operation
被测物 测量内容 标准值 测量结果 偏差 密封槽 内槽宽/mm 16±0.18 15.6555 −0.164 外槽宽/mm 16±0.18 15.6245 −0.195 内槽缺陷深度/mm <±0.05 −0.03 在允许范围内 外槽缺陷深度/mm <±0.05 −0.04 在允许范围内 大环 内环内径/mm Φ3304.68 Φ3304.663 −0.017 内环外径/mm Φ3336.11+0.25 Φ3335.912 −0.198 外环内径/mm Φ3386.785 Φ3386.972 +0.214 外环外径/mm Φ3418.66+0.25 Φ3418.355 −0.300
下载: 导出CSV
-
[1] 赫海涛,许志强,张永胜,等. 三维激光跟踪技术在核电厂压力容器安装中的应用研究[J]. 应用激光,2023, 43(7): 101-106. doi: 10.14128/j.cnki.al.20234307.101 [2] 杨忞婧. 地面三维激光扫描仪的测量误差分析[J]. 东华理工大学学报(自然科学版),2013, 36(2): 228-232. [3] 刘永骏. 三维激光测量系统在堆内构件在役维修中的应用[J]. 机械研究与应用,2017, 30(5): 84-86. doi: 10.16576/j.cnki.1007-4414.2017.05.023 [4] 高东强,杜诗亮,史志芳. 用接触式三坐标测量机进行逆向工程的方法研究[J]. 陕西科技大学学报(自然科学版),2006, 24(6): 77-80. [5] 林永兵,李杏华,张国雄. 基于多边法的三维坐标测量系统自标定最优方案[J]. 计量学报,2003, 24(3): 166-173. doi: 10.3321/j.issn:1000-1158.2003.03.002 [6] 王俊岭. 面向大空间定位的全方位视觉坐标定位测量初探[D]. 合肥: 合肥工业大学,2016. [7] 陈德林,郝飞,史晶晶,等. 浅谈三维视觉测量方法[J]. 仪表技术,2019(6): 21-24, 30. doi: 10.19432/j.cnki.issn1006-2394.2019.06.006 -

 下载:
下载:





计量
- 文章访问数: 456
- HTML全文浏览量: 245
- PDF下载量: 29
- 被引次数: 0
