Abstract:
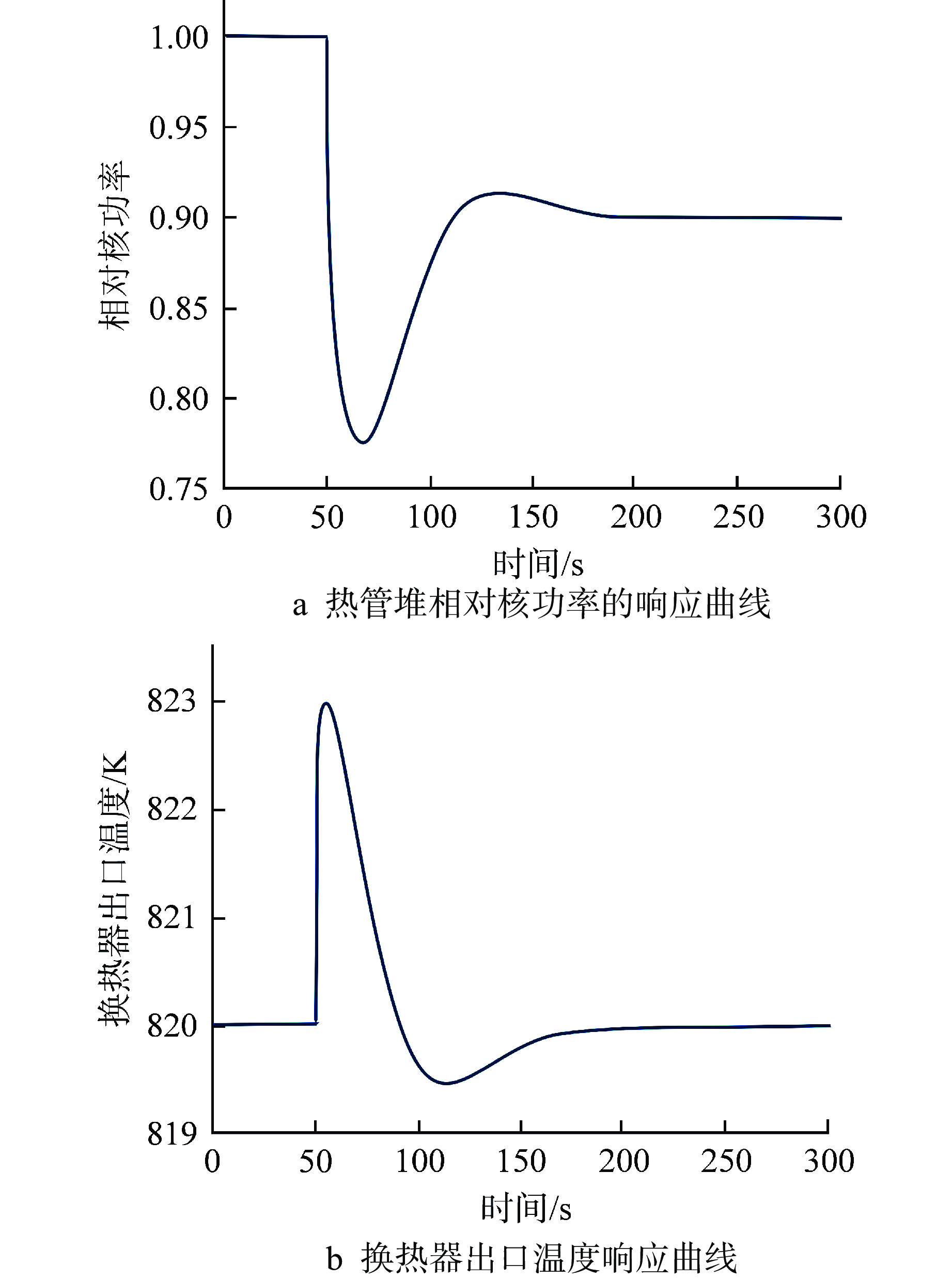
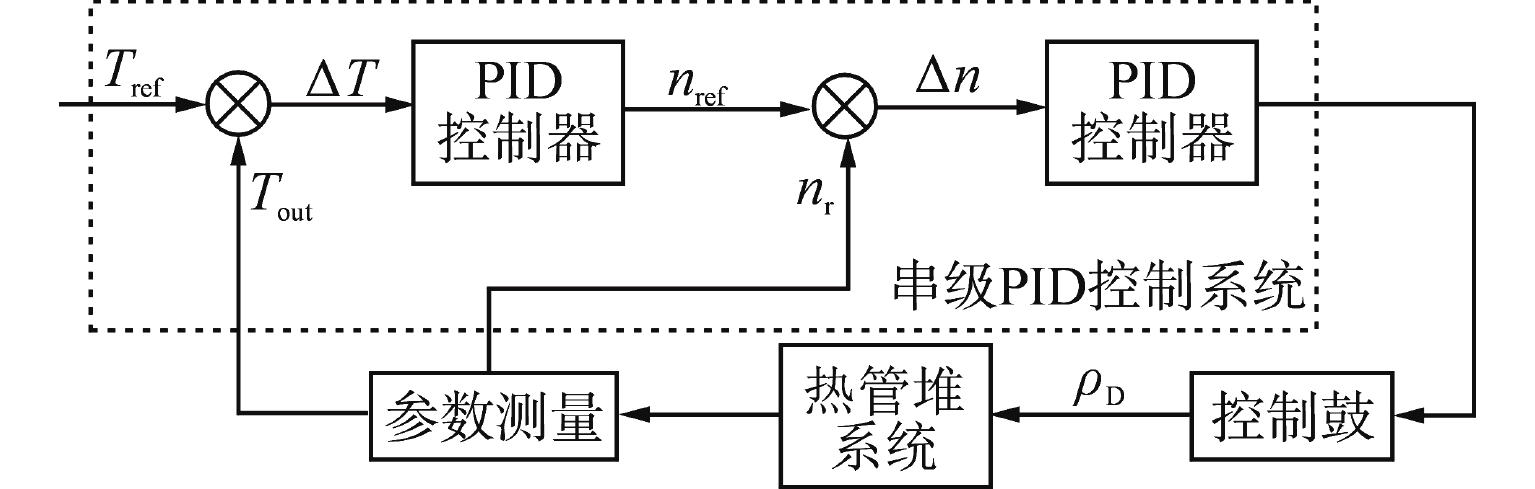
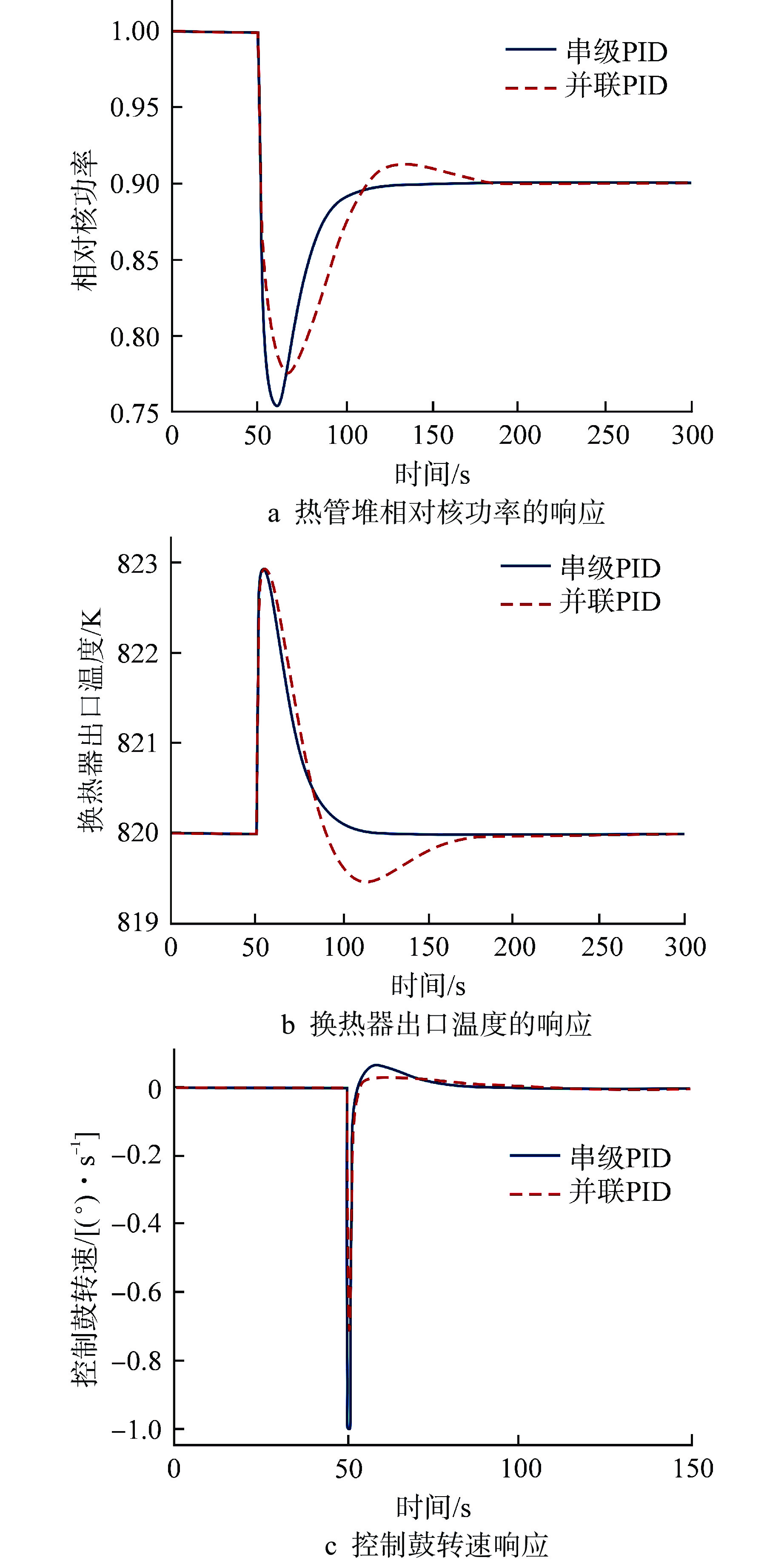
In order to study the nuclear power control method of heat pipe reactor (HPR), the lightweight dynamic model of MegaPower HPR is constructed, and then the designed controller is verified by simulation. Based on lumped parameter method, a heat transfer model from core to heat pipe and then to heat exchanger is studied, and Simulink model is established. Aiming at the control method design of HPR, the control objectives of load tracking and keeping the heat exchanger outlet temperature constant are determined. Then, two controllers, the parallel proportional-integral-derivative (PID) and the cascade PID, are designed, and their control effects are compared and analyzed. The results show that the steady-state error of the model is less than 0.05%, and the parameter response trend of the model without control is consistent with the theoretical analysis, and the simulation speed is faster. In terms of control, the two controllers can achieve the control objectives, and the adjustment time of nuclear power and heat exchanger outlet temperature is less than 150 s with small fluctuation amplitude. Therefore, the dynamic model of HPR established in this paper can be used to verify the control method, and the two controllers based on PID design have great control effect, and the cascade PID controller has better control performance.